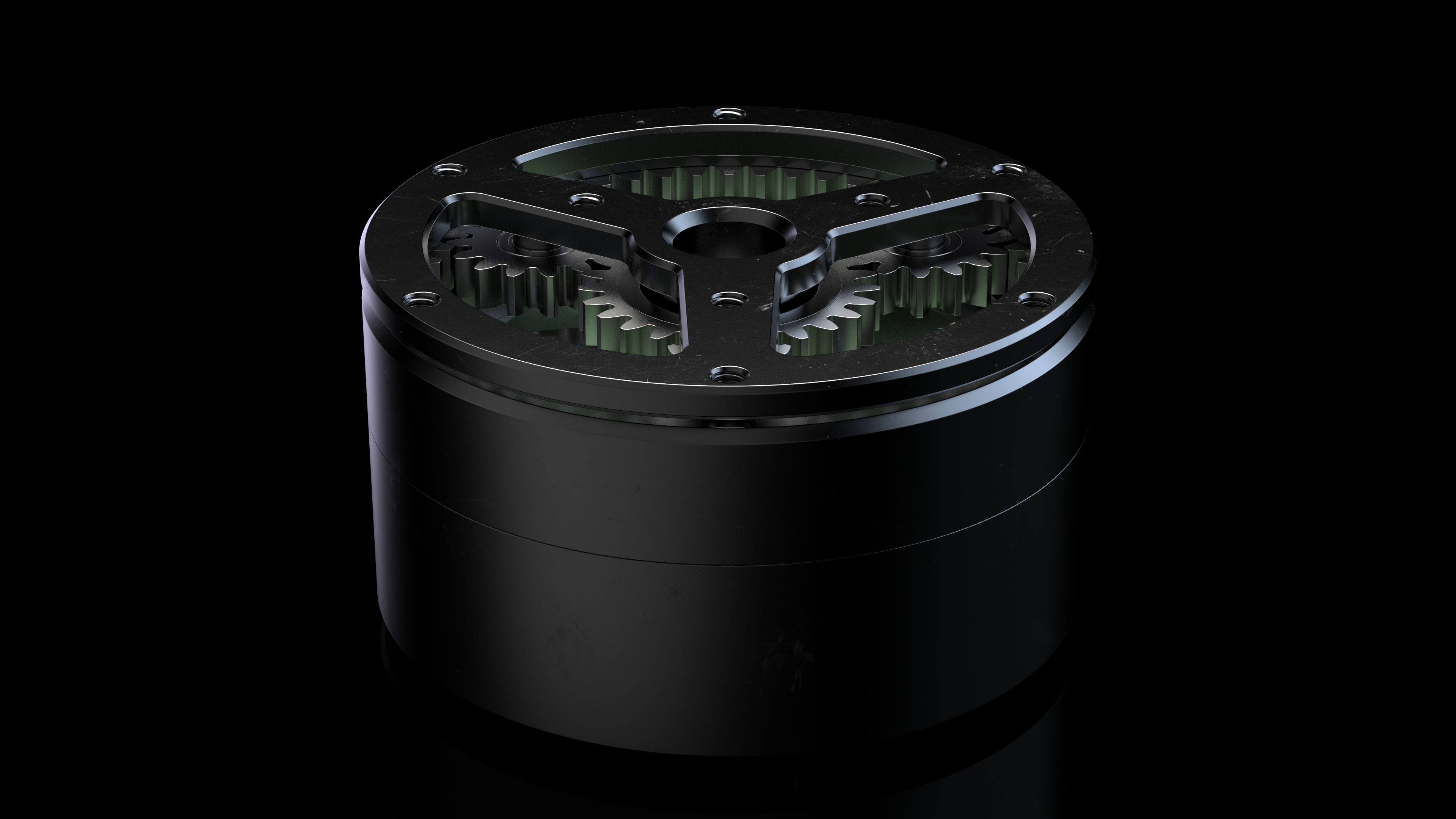

Our goal was to achieve cost effective design keeping sizes of motor minimal. We used standard bearings and retaining rings to secure mechanisms. Aluminium enclosure has cutouts and no seal because this motor supposed to be used in closed housing of robotic equipment.
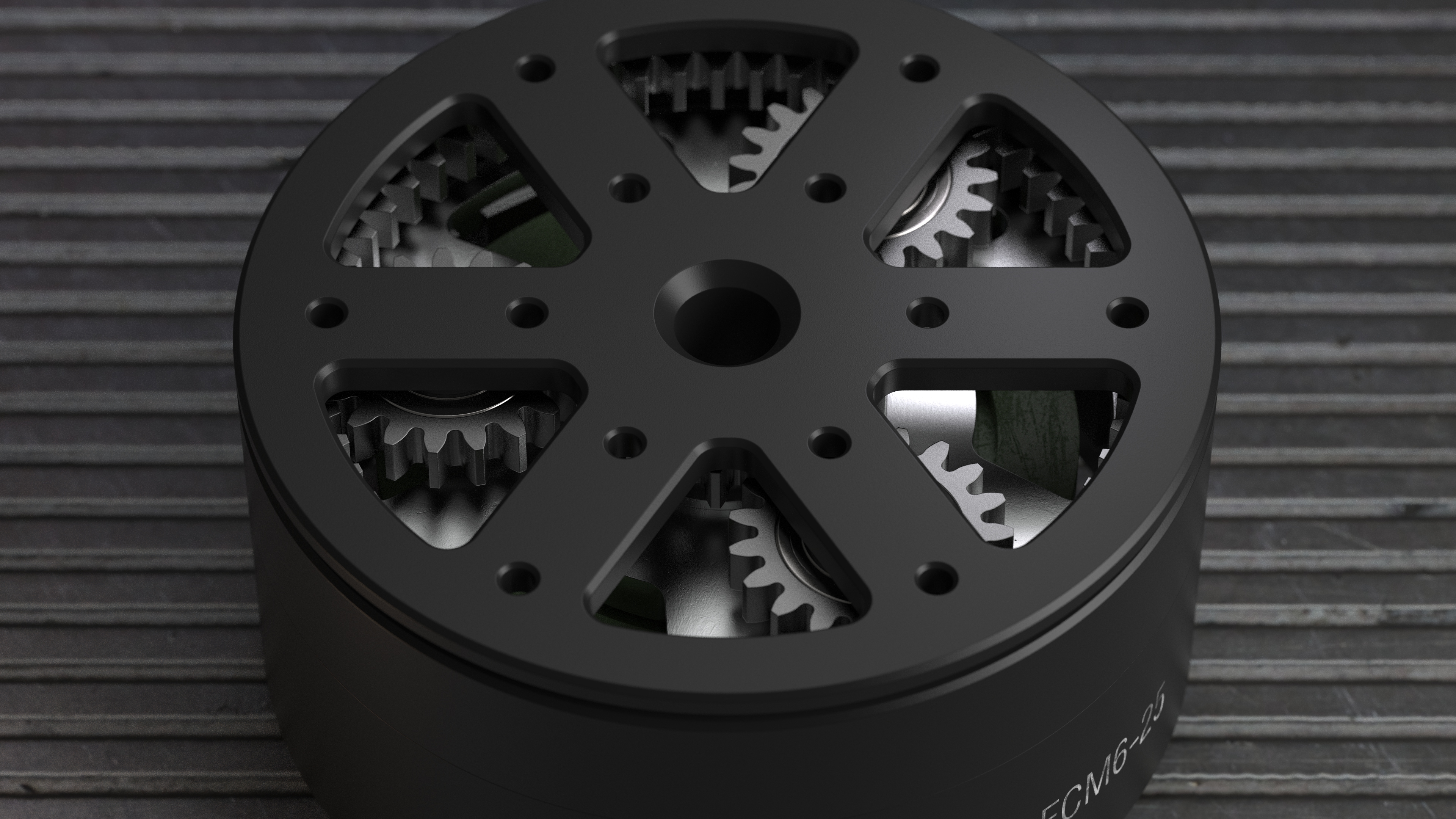
We developed 2 different assemblies for 2 different motor sizes. 1 with ratio 1:4 and one with ratio 1:3. Both servomotors has pass-through sliprings for connection of components on moving parts. No weather sealing was intended so we also made cutouts to save on mass by cost of processing these cutouts.
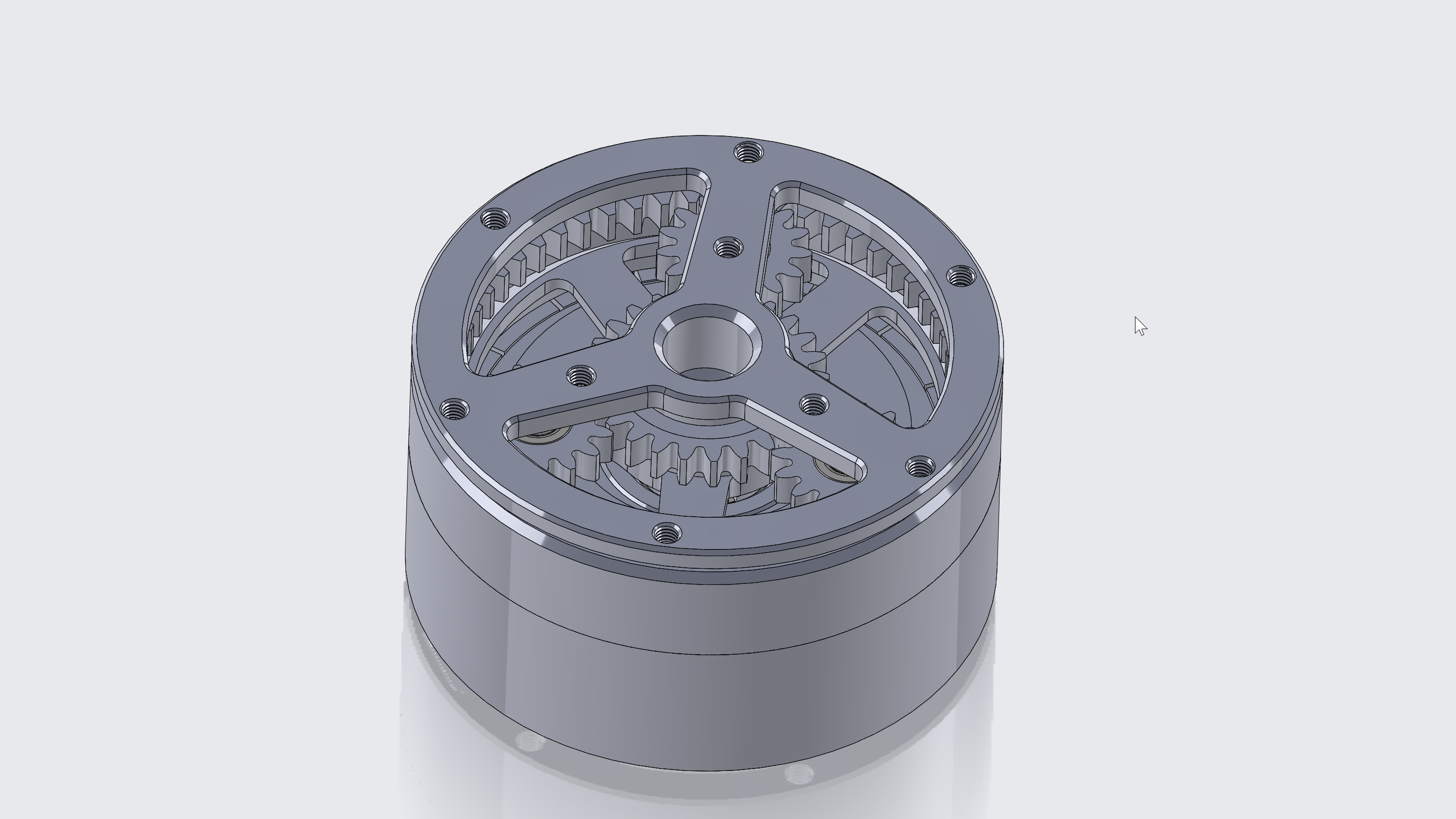
One of main goals was size reduction keeping the structural rigidity. So we had figure out how to mount parts to each other without holding them from outside.
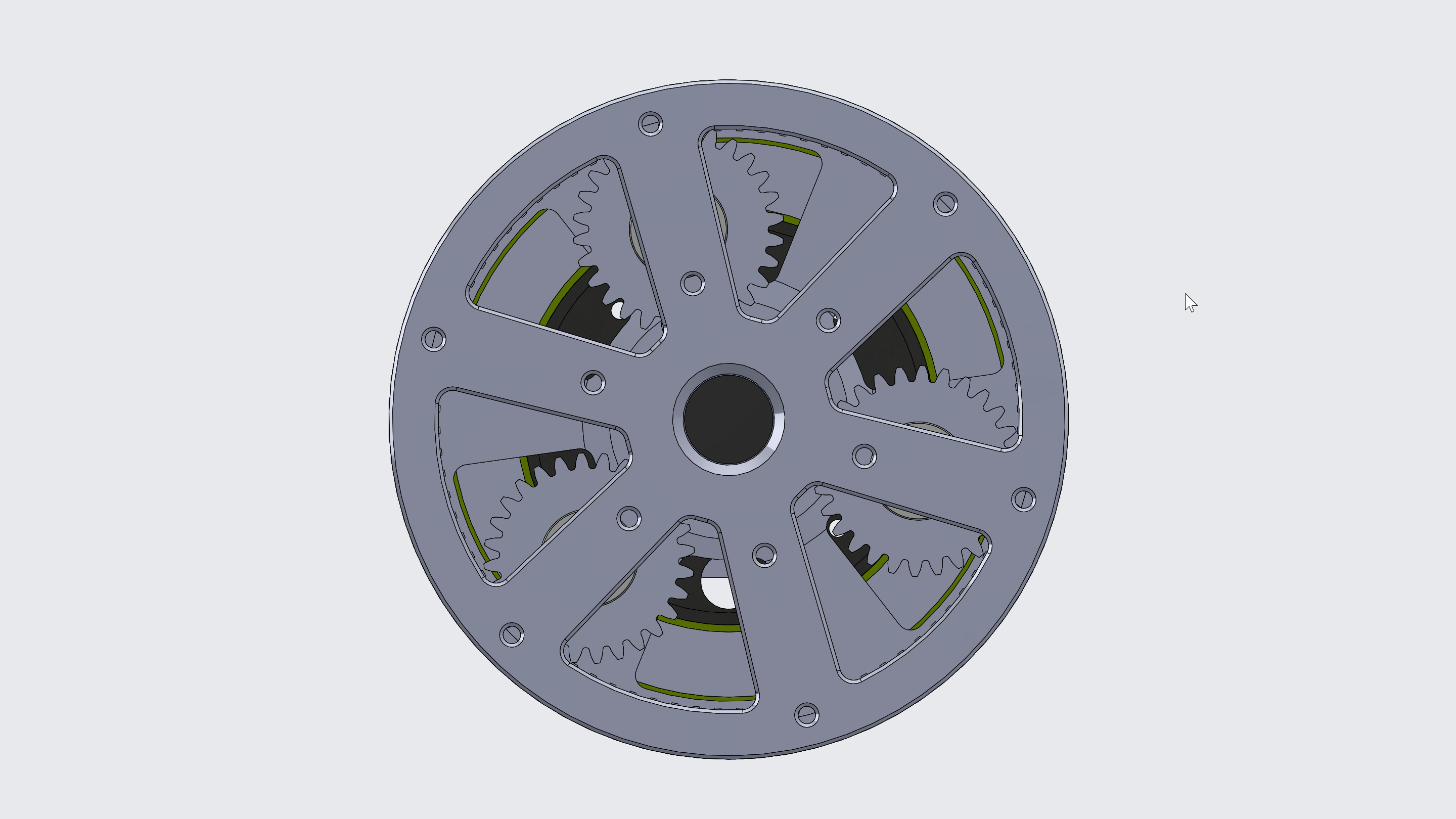
The controlling PCB was hidden underneath in the recess which protects PCB from mechanical loads of surrounding parts. Magnetic positioning sensors are located directly on PCB in order to optimize and simplify the assembly. 1 sensor is under the central magnetic ring (position of external rotor) and 1 is under internal rotor and its magnetic ring.
The rendering was not required but I like to render things.